| 设为首页| 加入收藏 | 联系我们 |
|
|
 
|
无功补偿四象限含义2025-06-07
无功补偿控制器中的“四象限”是基于有功功率(P)和无功功率(Q)的流动方向划分的工作状态。其核心目的是帮助判断电网中能量的流向及负载性质,从而采取相应的补偿措施。
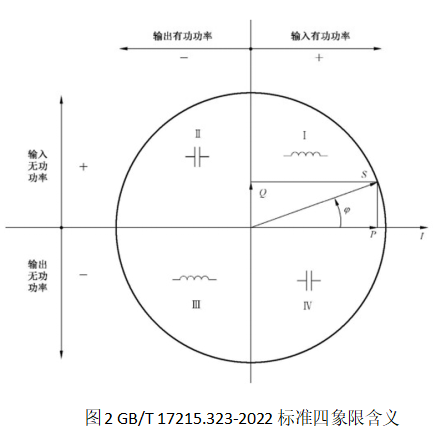
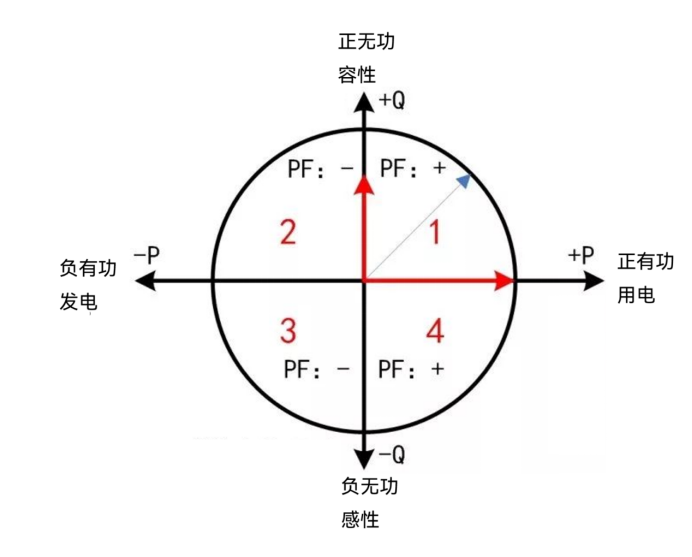 在GB/T 17215.323-2022标准中(上图),功率因数的正负是由有功功率的方向决定的,当处于用电状态时,有功功率为正,功率因数即为正;在发电状态有功功率为负,则功率因数也为负。有些功率因数控制器为了能更好的体现以及方便客户直观的感受,会根据无功功率的正负显示功率因数,即感性为正,容性为负,方便客户直观了解当前状态无功补偿是不足还是超补了。
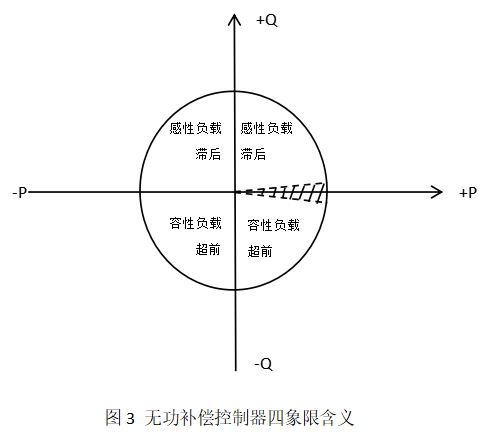
GB/T 17215.323-2022标准文本中定义的四象限图如下所示,与我们前面的描述有些出入:其II和III象限的感性、容性描述正好与我们上面的描述相反,其原因是标准的II和III象限是站在发电厂的角度谈感性和容性,我们的描述是站在用户的角度谈感性和容性,更方便用户对自己实际负载情况理解。 以下是四象限控制器的具体含义及典型应用场景:1.象限Ⅰ(+P,+Q):此象限常见于负载还需从电网侧吸收有功功率(即用电状态),且功率因数处于滞后,需要投入电容器进行无功补偿或者已经补偿到位(功率因数>0.9)的情况。2.象限Ⅱ(-P,+Q):此象限常见于光伏并网,当光伏发电量大于自身负载用电量(即发电状态),出现向电网进行倒送电,负载不从电网侧吸收有功功率,导致无功功率占比增大,此时功率因数大概率变差,也需要投入更多的电容进行补偿(比没有光伏发电时要补更多的电容)。3.象限Ⅲ(-P,-Q):此象限常见于光伏并网,当光伏发电量大于自身负载用电量,出现向电网进行倒送电,即负载不从电网侧吸收有功功率,且功率因数处于超前状态(即控制器功率因数前出现“-”的情况),即电容过补了。4.象限Ⅳ(+P,-Q):此象限常见于负载还需从电网侧吸收有功功率,且功率因数处于超前状态(即控制器功率因数前出现“-”的情况),电容也过补了。
注意:在没有光伏的前提下,不可能出现第二象限和第三象限的情况,如果有这种情况出现需要考虑接线是否正确(电压线与电流线不能同相);如果有光伏并网,原先处于第一象限可能会变换到第二象限;原先在第四象限可能变换到第三象限,但是只要功率因数达标就不会有问题。如果出现在第三或第四象限,若功率因数绝对值大于0.9,不管正负都不会出现力调电费罚款。若从电容的使用寿命考虑,可以切除部分电容,让其回到第一象限或者第二象限。此前提必须得保障回到第一或第二象限时功率因数仍能大于0.9。同时,当出现在I和IV两个象限之间来回摆动时(详见图3阴影部分),此时说明负载在波动,导致功率因数在1附近波动: B、若波动幅度超过±0.9,则需要处理,否则可能会导致力调电费罚款 此时有以下几种可能功率因数波动很大 (1)负载很小,电容太大,不补是滞后小于0.9;补的话,就变成超前0.9,过补了==》理想解决方案:更换电容,把电容容量变小。(大多数情况下可以不处理,因为负载很小,虽然功率因数很差,但实际负载小,无功也不大,这种情况大多数发生在工厂下班时段,上班后负载还是能大起来,就基本不用处理,因为电力公司的力调电费罚款是依据一个月的平均功率因数,只要上班时段功率因数达标,基本可以忽略下班时段的功率因数) (2)负载已经比较大,电容也不大,还是导致功率因数剧烈波动:此时大概率是谐波导致,谐波无功电容是无法补偿的,谐波比较大时(比如THD超过40%),若控制器能测量谐波无功,就会功率因数波动很大。因为此时很可能基波无功已经补偿到位了,功率因数低是因为谐波无功导致,负载变化导致基波功率在1附近正负微小波动(满足电力公司要求),会带着谐波无功大幅度波动,导致看到功率因数剧烈波动,这种情况下只能通过谐波治理,降低谐波比例,才能解决问题,否则功率因数大概率无法达标,会产生力调电费罚款。 C、同理,在II和III象限来回波动,与I和IV象限的波动是一样的,唯一的差别是II和III象限波动是发生在光伏倒送电的情况下。
|
|